


伺服的控制術語有很多:閉環控制、半閉環控制、開環控制,速度環、電流環、位置環,很多朋友相信沒有弄清楚,今天就為大家詳細解答一下,伺服的控制模式是怎樣的?該怎樣系統的掌握這一塊?
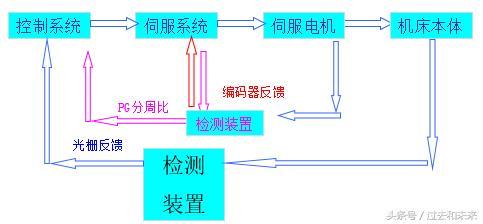
控制系統的控制類型
開環控制:沒有檢測裝置,或者不反饋機床的位移量到控制器。就位置控制而言,指令信號形式多為pulse
半閉環控制:檢測裝置安裝伺服電機上,間接反饋機床的位移量到控制器,不考慮機械誤差。
全閉環控制:檢測裝置安裝機床本體上,直接反饋機床的位移量到控制器。后二者,就位置控制而言指令信號形式多為模擬量電壓。
控制模式種類
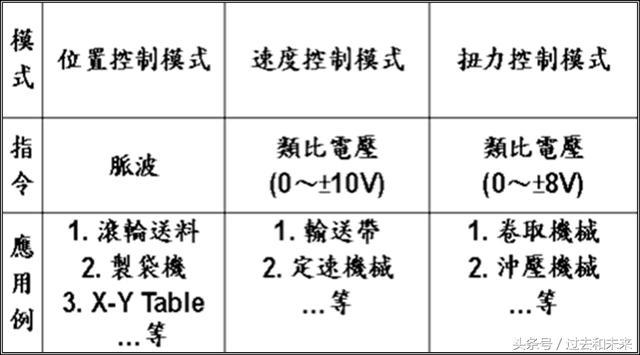
伺服放大器三種控制方式
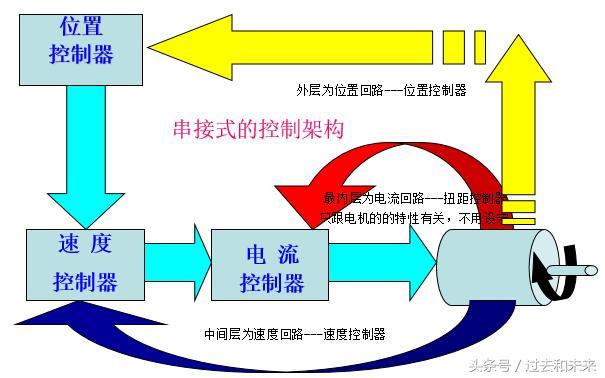
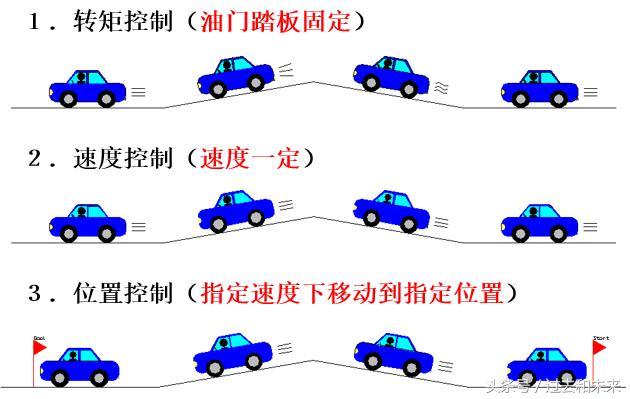
1轉矩控制:通過外部模擬量的輸入或直接的地址的賦值來設定電機軸對外的輸出轉矩的大小,主要應用于需要嚴格控制轉矩的場合。——電流環控制
2速度控制:通過模擬量的輸入或脈沖的頻率對轉動速度的控制。——速度環控制
3位置控制:伺服中最常用的控制,位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉動速度的大小,通過脈沖的個數來確定轉動的角度,所以一般應用于定位裝置。
控制理論概念
位置控制模式
位置控制的區分:
1.半閉回路控制Ⅰ「馬達軸端檢出」
2.半閉回路控制Ⅱ「減速機端檢出」
3.全閉回路控制「機械位置檢出」
使用AC伺服馬達用于位置控制,一般是指由與伺服馬達軸心一體化的位置檢出器 (編碼器、角度檢測器等) 取得回授訊號,當與位置指令量一致時,使馬達軸停止之控制,并執行伺服鎖定之機能(SERVO LOCK)。
適用于位置控制
AC 伺服馬達用于位置控制,以用途分別可區分為2大項

位置環的作用
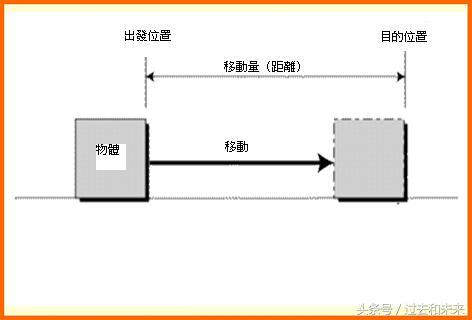
★定位指令通常以脈沖列形式輸入,脈沖總數為定位量,定位速度是單位時間(秒)的脈沖量。(PPS:Pulse/Second)
★輸入的脈沖量與反饋的脈沖數量相一致時,這才實現定位完了。
★在位置控制部中,因為有輸入脈沖的加算、反饋脈沖的減算,所以有一個計數器。(也稱偏差計數器)
位置控制時:工控機及上位控制器發出位置指令信號,脈沖+方向,送入脈沖列,經伺服電子齒輪分頻后,在偏差可逆計數器中與反饋脈沖信號比較后形成偏差信號,反饋脈沖是由光電編碼器檢測到電機實際所產生的脈沖數。經四倍頻后的,位置偏差信號經位置環的復合前饋控制器調節后,形成速度指令信號,速度指令信號與速度反饋信號比較后的偏差信號經速度環比例積分控制器調節后產生電流指令信號,在電流環中經矢量變后,由SPWM輸出轉矩電流,控制交流伺服的運行,位置控制精度由光電編碼器每轉產生的脈沖數控制,有絕對與增量兩種,增量的易于掌握,平均壽命長,分辨率高,但斷電后無保持。
速度控制模式
AC伺服馬達與其它一般的可變速裝置:(變頻器、直流馬達等)一樣,運轉速度可變換。其特長:
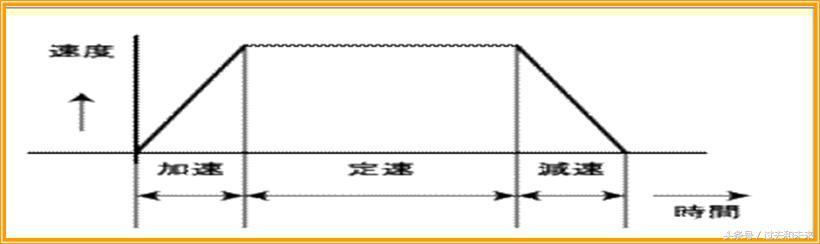
a.緩起動、停止機能:加減速時產生的沖擊,加速及減速的變動率。
b.廣大的速度控制范圍:從低速至高速之間的控制范圍(1:1000 ~ 5000)速度控制范圍內、定轉矩特性。
c.速度變動率小:即使負載變動,速度依然不會有太大的改變產生。
轉矩控制模式
AC伺服馬達以電流做高精度的輸出轉矩控制。一般的用途為位置控制或速度控制時依速度偏差的結果所做電流控制。或由外部直接控制電流值、亦可控制馬達的輸出轉矩如絞布機械等張力控制即可運用。
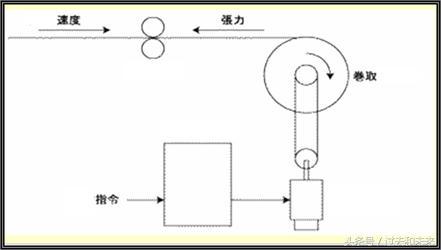
A.張力控制時,卷取的滾輪半徑越大時、負載轉矩相對增加。伺服馬達的輸出轉矩相對增加。
B.卷取途中材料切斷時,負載瞬間變輕,但馬達高速回轉,此時伺服馬達的輸出轉矩減少。
伺服的性能評價
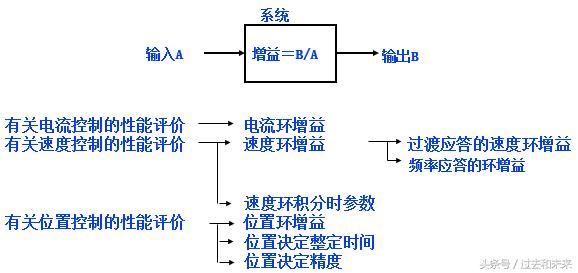
評價伺服的應答性(指令輸入后輸出的情況(電機如何轉動),使用回路增益這個用語就是GAIN,獲得和利益的意思。是輸入和輸出之比所解釋的技術術語,現在直接使用增益來表示。
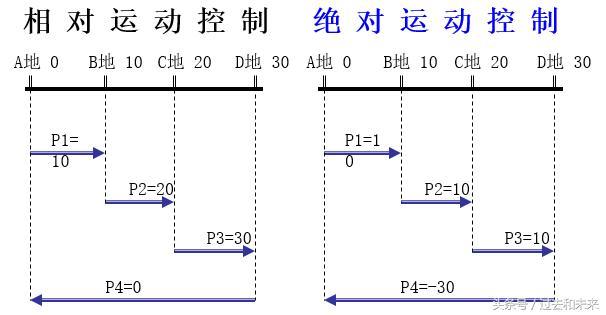
1.相對運動:必需對位置值加以計算,點動運行、往返運動一定位置量的控制系統。
2.絕對運動:直接下達位置值,可用于XY軸、table等,一般的機械均可使用。于指令程序中較為簡便。


